ഒച്ചിനെ പോലെ ഇഴയുന്ന റോബോട്ടിനെ വികസിപ്പിച്ചെടുത്ത് ബ്രിസ്റ്റോൾ സർവകലാശാലയിലെ ഗവേഷകർ . ഇതോടെ റോബോട്ടുകളുടെ ചലന രീതികളിൽ ഏറ്റവും നൂതനമായ ഒന്നായി ഈ ഇഴയുന്ന റോബോട്ടുകൾ.

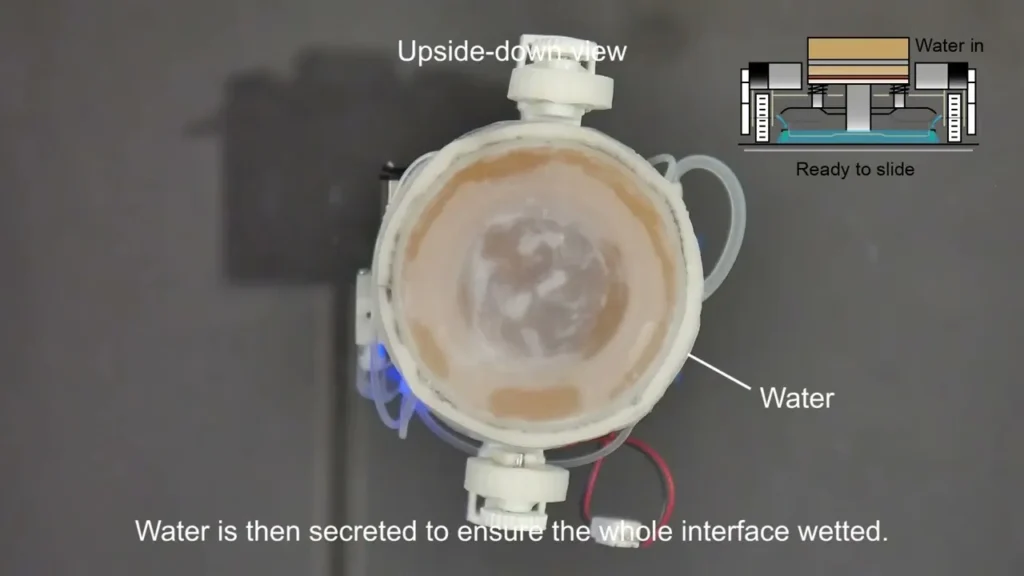
റോബോട്ടിൽ ഘടിപ്പിച്ച സ്ലൈഡിംഗ് സക്ഷൻ മെക്കാനിസം ഒച്ചിൻ്റെ മ്യൂക്കസിന് പകരമായി പ്രവർത്തിക്കുന്നു, അത് റോബോട്ടിനെ സ്ലൈഡുചെയ്യാൻ പ്രാപ്തമാക്കുന്നു. ഉയരമുള്ള പ്രതലങ്ങളിലും കെട്ടിടങ്ങളിലും ഇഴഞ്ഞു കയറുവാനും ഇത് റോബോട്ടിനെ സാധ്യമാക്കും. അങ്ങനെ റോബോട്ടുകൾക്ക് ചുവരുകൾ എളുപ്പത്തിൽ അളക്കാനുള്ള ശേഷി എളുപ്പമാകും.
ചെന്നെത്താൻ പ്രയാസമുള്ള പ്രതലങ്ങളായ ടർബൈനുകൾ, കപ്പലുകളുടെ ഹൾ, വിമാനങ്ങൾ, ഉയരമുള്ള ഗ്ലാസ് ജാലകങ്ങൾ എന്നിവ അളക്കാനും മറ്റുമുള്ള സംവിധാനങ്ങൾ ഇനി എളുപ്പമാകും. ഉയർന്ന ഒരു പ്രതലത്തിലൂടെ റോബോട്ടുകൾക്ക് പേലോഡ് സക്കർ ഉപയോഗിച്ച് സ്ലൈഡ് ചെയ്യാൻ കഴിയും.
വ്യാവസായിക ഗ്രിപ്പിംഗ്, ക്ലൈംബിംഗ്, ഔട്ട്ഡോർ, ഗതാഗതം എന്നിവയുൾപ്പെടെ റോബോട്ടിക് ഫീൽഡുകളിലെ ഭാവി ആപ്ലിക്കേഷനുകൾക്ക് ഈ സ്ലൈഡിംഗ് സക്ഷൻ വലിയ സാധ്യതകൾ നൽകുന്നു.
സ്ലൈഡിംഗ് സക്ഷൻ മെക്കാനിസത്തിൽ മ്യൂക്കസ് ഒരു പ്രധാന പങ്ക് വഹിക്കുന്നതിനാൽ സക്ഷൻ നിലനിൽക്കുമ്പോൾ റോബോട്ടിനെ സ്ലൈഡ് ചെയ്യാൻ സഹായിക്കുന്നതിന് വിലകുറഞ്ഞതും എളുപ്പത്തിൽ ആക്സസ് ചെയ്യാവുന്നതും ശുദ്ധവുമായ കൃത്രിമ മ്യൂക്കസാണ്. തന്നേക്കാൾ പത്തിരട്ടി ഭാരമുള്ള ഭാരം വഹിക്കുന്ന ഉയർന്ന ലോഡഡ് സ്ലൈഡിംഗ് കഴിവും റോബോട്ട് പ്രകടമാക്കി.
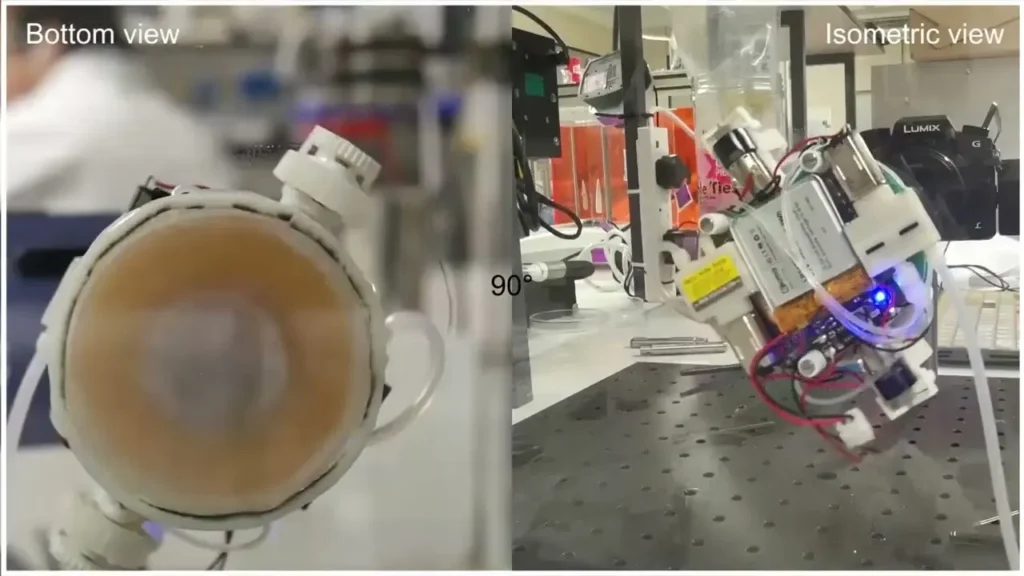
സ്ലൈഡിംഗ് സക്ഷൻ ഒരു ഭാരം കുറഞ്ഞ റോബോട്ടിനെ ലംബമായും തലകീഴായും സ്ലൈഡ് ചെയ്യാൻ അനുവദിക്കുന്നു. പരീക്ഷണങ്ങളിൽ ഉയർന്ന വേഗത കൈവരിക്കുന്ന റോബോട്ടുകൾക്ക് സ്റ്റാറ്റിക് അഡീഷൻ സമയത്ത് ഊർജ്ജം ആവശ്യമില്ല.
സ്ലൈഡിംഗ് സക്ഷൻ മെക്കാനിസം ഒരു പുതിയ ക്ലീൻ ക്ലൈംബിംഗ് തന്ത്രമാണെന്നും, അത് അടുത്ത തലമുറയിലെ ക്ലൈംബിംഗ് റോബോട്ടുകളുടെ വികസന പരിപാടികളെ മുന്നോട്ട് കൊണ്ടുപോകുമെന്നും ബ്രിസ്റ്റോൾ റോബോട്ടിക്സ് ലബോറട്ടറി പ്രതീക്ഷിക്കുന്നു.
Researchers at the University of Bristol have developed a snail-inspired robot that mimics stable adhesive sliding behavior, revolutionizing surface inspection in industries like wind energy and aerospace.